Когда мы говорим о роботах, часто возникает образ умных машин, способных выполнять самые разнообразные задачи – от доставки посылок до проведения хирургических операций. Однако за этим внешним блеском скрывается множество сложных технологий, которые позволяют роботам работать с максимальной точностью и слаженностью. Одной из таких ключевых технологий является NTP (Network Time Protocol) – протокол синхронизации времени. Его роль в робототехнике часто недооценена, но на самом деле она крайне важна для координации работы сложных систем.
Но что же такое NTP, и как он помогает роботам работать эффективно? В этой статье мы разберем, что такое NTP, как его использование влияет на робототехнику, и почему синхронизация времени так важна для создания высококачественных и надежных роботов.
- Что такое NTP и как он работает?
- Практическое применение NTP в робототехнике
- 1. Координация работы множества роботов
- 2. Прецизионное управление движением
- 3. Интеграция с внешними системами и облачными сервисами
- Почему синхронизация времени критична?
- Сложность взаимодействия с реальным миром
- Сложности при многозадачности
- Как внедрить NTP в робототехнические системы?
- Шаги по настройке NTP:
- Заключение
- Облако тегов
- Что такое NTP и почему он важен для робототехники?
- Зачем роботы нуждаются в точной синхронизации времени?
- Как работает NTP в распределённых системах роботов?
- Этапы синхронизации через NTP
- Преимущества использования NTP в робототехнике
- 1. Точная координация действий
- 2. Снижение рисков ошибок и сбоев
- 3. Высокая надёжность и отказоустойчивость
- 4. Гибкость и масштабируемость
- Практическое применение NTP в робототехнике
- Пример 1: Автономные транспортные средства
- Пример 2: Роботы для исследований в экстремальных условиях
- Проблемы и ограничения использования NTP
- 1. Задержки в сети
- 2. Зависимость от внешних источников времени
- Заключение
- Облако тегов
Что такое NTP и как он работает?
NTP (Network Time Protocol) – это протокол, который используется для синхронизации времени в компьютерных и сетевых системах. Он позволяет синхронизировать часы устройств с точностью до миллисекунд, что критически важно для корректной работы множества систем, включая робототехнику. Протокол NTP работает по принципу запросов и ответов, где устройства, подключенные к сети, получают временные метки от серверов, синхронизированных с атомными часами или другими высокоточным источниками времени.
Основная цель NTP заключается в обеспечении точности и согласованности времени между всеми устройствами в сети. В робототехнике это означает, что все компоненты робота – от датчиков до исполнительных механизмов – должны работать по общему времени, чтобы их действия были синхронизированы и точны. Это особенно важно в таких областях, как автономные системы, где время играет роль в принятии решений и взаимодействии с окружающей средой.
Практическое применение NTP в робототехнике
Синхронизация времени через NTP важна не только для правильной работы роботов, но и для их взаимодействия с другими устройствами. Рассмотрим несколько ключевых примеров использования NTP в робототехнике.
1. Координация работы множества роботов
Представьте себе ситуацию, когда несколько роботов работают в одной команде, например, при выполнении задачи по поиску и спасению. В такой ситуации важно, чтобы все роботы точно синхронизировали свои действия, чтобы они могли эффективно взаимодействовать друг с другом. Например, один робот может обнаружить опасность и передать информацию другим, а те должны отреагировать синхронно, чтобы избежать ошибок или задержек в процессе.
Для этого необходимо, чтобы все роботы имели одинаковое представление о времени. Если бы их часы не были синхронизированы, возможно возникновение ситуаций, когда один робот начал бы выполнять задачу слишком рано, а другой – слишком поздно, что могло бы привести к неэффективной работе всей команды.
2. Прецизионное управление движением
Еще одним важным аспектом является использование NTP для точного управления движением роботов. В робототехнике важна каждая миллисекунда: от того, насколько точно робот выполнит движения, зависит не только его эффективность, но и безопасность. Например, при манипуляциях с хрупкими объектами или при движении в сложных условиях (например, в лабиринте или в условиях ограниченной видимости), синхронизация времени становится решающим фактором.
Если система управления движением робота не получает точные временные метки, могут возникнуть ошибки в расчетах скорости, направления или времени отклика системы. Использование NTP помогает избежать подобных проблем, обеспечивая точную синхронизацию всех компонентов и минимизируя риск ошибок.
3. Интеграция с внешними системами и облачными сервисами
Почему синхронизация времени критична?
Кажется, что синхронизация времени – это не такая уж сложная задача. Однако, когда речь идет о роботах, которые должны точно взаимодействовать с окружающим миром, вопросы времени становятся намного более важными. Давайте разберемся, почему.
Сложность взаимодействия с реальным миром
Роботы взаимодействуют с окружающей средой, используя датчики и исполнительные механизмы. Эти устройства работают в реальном времени и должны точно учитывать все изменения, происходящие в их окружении. Например, робот, использующий лазерные датчики для измерения расстояния, должен мгновенно реагировать на изменения, происходящие в пространстве. Если данные от датчиков приходят с задержкой или с неправильной временной меткой, робот может не успеть отреагировать на опасность или выполнить задачу с нужной точностью.
Сложности при многозадачности
В роботах часто используются несколько различных подсистем, каждая из которых выполняет свою задачу. Эти подсистемы должны работать согласованно и координировать свои действия для выполнения общей цели. Без точной синхронизации времени взаимодействие между этими подсистемами будет нарушено, и робот не сможет действовать эффективно. В этом контексте NTP становится незаменимым инструментом для обеспечения синхронизации всех процессов.
Как внедрить NTP в робототехнические системы?
Внедрение NTP в робототехнические системы может показаться сложным процессом, однако современные технологии и инструменты делают это достаточно простым. Все, что нужно, это установить подходящий сервер времени и настроить синхронизацию для всех компонентов системы.
Шаги по настройке NTP:
- Выбор источника времени: Обычно роботы используют серверы времени, синхронизированные с атомными часами или GPS. Этот шаг является основой для точности работы всей системы.
- Настройка серверов NTP: Убедитесь, что серверы времени настроены правильно и доступны для всех роботов в сети.
- Синхронизация времени: Подключите роботов к сети NTP и настройте их так, чтобы они регулярно получали временные метки и синхронизировались с сервером.
- Проверка точности: Проверьте точность синхронизации времени между всеми устройствами, чтобы убедиться в корректной работе системы.
Заключение
Синхронизация времени играет решающую роль в робототехнике, обеспечивая координацию, точность и надежность работы роботов. Протокол NTP помогает создать эффективные и стабильные системы, которые могут работать в условиях реального времени, взаимодействовать с другими устройствами и быстро адаптироваться к изменениям внешней среды. Внедрение NTP в робототехнические системы – это не просто техническая необходимость, а важный шаг на пути к созданию умных, автономных и высококачественных машин будущего.
Облако тегов
Что такое NTP и почему он важен для робототехники?
Как известно, NTP предназначен для синхронизации системных часов устройств в сети. Этот протокол позволяет поддерживать точное время на всех участниках системы, обеспечивая синхронную работу, что особенно важно для роботов, работающих в координированных группах или на различных платформах. В нашей статье мы разберемся, как NTP используется в робототехнике для синхронизации времени и почему это так важно для функционирования распределённых систем роботов.
Зачем роботы нуждаются в точной синхронизации времени?
Представьте себе ситуацию: несколько роботов выполняют сложную задачу, например, перемещаются по территории для поиска объектов или занимаются сбором данных. Каждый из этих роботов должен быть синхронизирован с остальными, чтобы избежать ошибок в координации. Даже малейшее отклонение во времени может вызвать проблемы, такие как несоответствие движений роботов, задержки в коммуникации или даже полные сбои в работе системы.
В распределённой системе роботов для обеспечения согласованности действий важно, чтобы все устройства «знали» одинаковое время. NTP решает эту задачу, позволяя каждому роботу в сети синхронизировать свои системные часы с сервером времени, поддерживая единую временную шкалу для всех участников. Это особенно важно, когда роботы работают в реальном времени, например, при взаимодействии с внешней средой или другими устройствами.
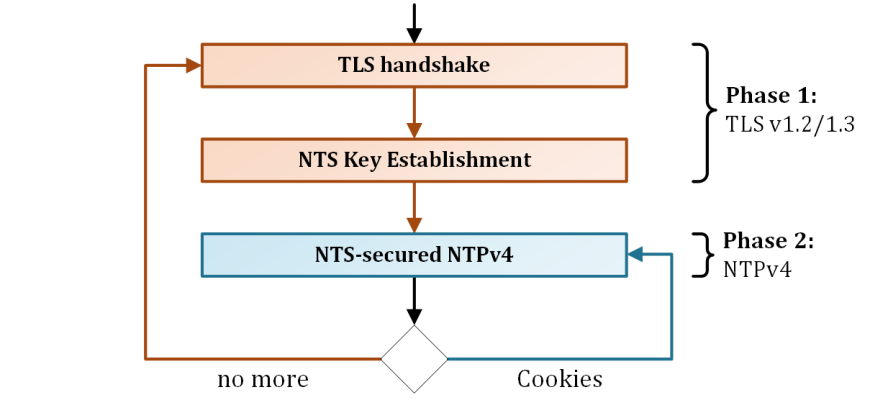
Как работает NTP в распределённых системах роботов?
Протокол NTP работает по принципу клиент-сервер: устройства, подключенные к сети, синхронизируют свои часы с серверами времени, которые получают данные от более точных источников, таких как атомные часы или GPS-системы. В робототехнике часто используется архитектура с несколькими серверами времени, которые могут обслуживать разные участки системы. Рассмотрим, как NTP помогает поддерживать синхронность в распределённых системах роботов.
В первую очередь, каждый робот или сенсор в сети подключается к NTP-серверу, который предоставляет точную информацию о времени. Синхронизация может происходить через интернет или локальную сеть, в зависимости от конфигурации системы. Роботы регулярно обновляют свои системные часы, что позволяет всем участникам системы работать с одинаковым временным интервалом, независимо от физического расстояния между ними.
Этапы синхронизации через NTP
Процесс синхронизации через NTP можно разделить на несколько ключевых этапов:
- Запрос времени: Робот отправляет запрос на сервер времени, чтобы получить текущее время.
- Получение времени: NTP-сервер отправляет обратно ответ с меткой времени, на основе которой робот будет корректировать свои часы.
- Коррекция времени: Робот получает информацию о временной задержке и корректирует свои часы с учётом времени, полученного от сервера.
- Регулярная синхронизация: Робот периодически обновляет своё время, чтобы поддерживать высокую точность синхронизации в течение работы.
Преимущества использования NTP в робототехнике
Использование NTP в робототехнике приносит множество преимуществ, которые играют ключевую роль в бесперебойной работе распределённых систем. Рассмотрим, какие основные выгоды получает система роботов при применении NTP.
1. Точная координация действий
Одно из самых очевидных преимуществ – это улучшенная координация. В случае работы группы роботов, каждый из которых выполняет свою задачу, синхронизация времени позволяет избежать рассинхронизации и обеспечивать слаженную работу всей группы. Например, при взаимодействии роботов с людьми или другими устройствами, точное время позволяет минимизировать задержки и ошибки в коммуникации.
2. Снижение рисков ошибок и сбоев
Когда роботы работают в реальном времени, любые расхождения во времени могут привести к значительным ошибкам. В случае с NTP, поддержка точного времени предотвращает такие сбои, обеспечивая стабильную работу системы даже в условиях высоких нагрузок. Роботы могут выполнять задачи в чёткой последовательности, минимизируя вероятность ошибок в вычислениях или в принятии решений.
3. Высокая надёжность и отказоустойчивость
Многие системы роботов используют несколько серверов времени для повышения надёжности. Если один сервер выходит из строя, система может переключиться на другой, обеспечивая бесперебойную работу. Это делает использование NTP особенно важным для критически важных приложений, таких как автономные роботы в медицине или промышленности.
4. Гибкость и масштабируемость
NTP не ограничивает систему роботов одной сетью или одним видом подключения. Протокол может работать как в локальных сетях, так и через интернет, что даёт возможность использовать роботов в различных сценариях – от небольших автономных устройств до больших распределённых систем. Также благодаря NTP можно легко расширять систему, добавляя новые устройства или роботов, которые автоматически синхронизируются с остальными.
Практическое применение NTP в робототехнике
Теперь давайте подробнее рассмотрим несколько примеров, когда использование NTP оказывается критически важным для успешной работы роботов и их взаимодействия.
Пример 1: Автономные транспортные средства
Автономные автомобили и роботы, работающие в режиме реального времени, например, для доставки товаров, обязательно должны синхронизировать свои действия, чтобы избежать аварий или неправильной работы системы. Например, в ситуации, когда несколько транспортных средств двигаются по маршруту, важно, чтобы их внутренние часы были синхронизированы, чтобы все машины корректно реагировали на изменения в окружающей среде и взаимодействовали друг с другом.
Пример 2: Роботы для исследований в экстремальных условиях
Роботы, работающие в условиях, где присутствуют большие задержки или перемещения между удалёнными регионами (например, роботы на Марсе или в глубоководных исследованиях), также зависят от точной синхронизации времени. Протокол NTP позволяет синхронизировать системы этих роботов, даже если они находятся в разных частях планеты или даже в космосе, через сети связи, что делает их работу эффективной и безопасной.
Проблемы и ограничения использования NTP
Несмотря на все преимущества, NTP не является идеальным решением для всех случаев. В некоторых ситуациях могут возникать определённые проблемы и ограничения, с которыми необходимо считаться.
1. Задержки в сети
Одной из основных проблем является задержка в сети. Если связь между роботом и сервером времени не идеальна, это может повлиять на точность синхронизации. В таких случаях время может быть откорректировано не точно, что приведет к небольшим, но потенциально важным отклонениям в работе роботов.
2. Зависимость от внешних источников времени
Когда роботы зависят от внешних NTP-серверов, существует риск потери синхронизации в случае выхода серверов из строя или потери связи. В таких случаях могут быть использованы резервные серверы или другие технологии, но важно учитывать возможность таких ситуаций при проектировании системы.
Заключение
Протокол NTP стал неотъемлемой частью робототехники, особенно когда речь идет о распределённых системах, состоящих из множества роботов, которые должны работать синхронно. Он позволяет минимизировать риски ошибок, повысить эффективность работы роботов и обеспечить высокую надёжность систем. Однако важно помнить, что для достижения максимальной точности необходимо учитывать возможные задержки и риски, связанные с внешними источниками времени. В будущем, с развитием технологий и улучшением сетевой инфраструктуры, синхронизация через NTP будет только улучшаться, открывая новые горизонты для робототехники.